Before we start, take a moment to appreciate how fascinating microprocessors truly are. The device you are reading from this article – whether your phone or your computer – runs entirely on its microprocessor (alongside RAM, storage systems… etc, which are useless without a microprocessor). And yet, at its core, it is just a tiny piece of metalloid (Silicon) and some metal interconnections (Copper/Aluminum), so what’s the secret?
The Structure of Microprocessors
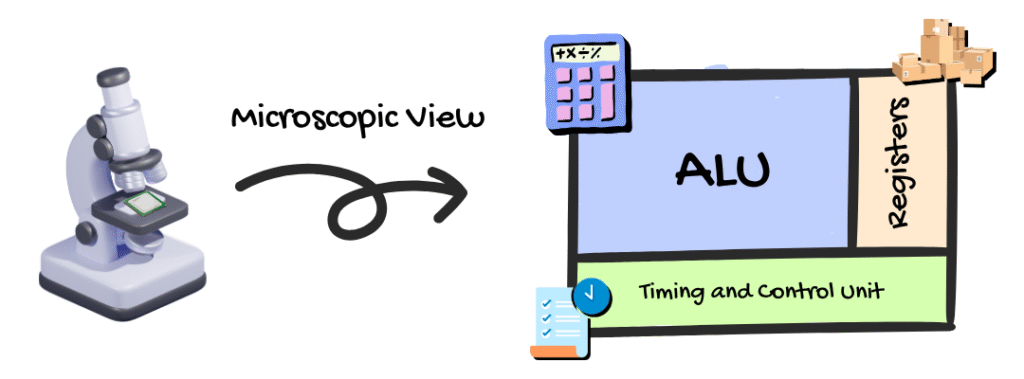
Macroscopic? A piece of metal. Microscopic? That’s where the magic happens.
The microprocessor is composed approximately of 30 billion transistors, which can be taken as semiconductors (materials that can switch between conducting and insulating states), this explains how it performs so many tasks in an instant.
Inside the microprocessor, everything is organized into key sections: Arithmetic & Logic Unit (ALU) – Registers – Timing and Control Unit, and each with a specialized role:
- The Arithmetic & Logic Unit : I’m the mathematician. I handle arithmetic operations like addition or subtraction, and logical operations like comparing values or checking conditions.
- Registers : We store the data the processor needs right now.
- The Timing and Control Unit : I’m the coordinator, I tell the processor which instructions to execute, when to use the ALU, and how data goes between components like memory and registers.
The Instruction Cycle
It is the part where we see how a microprocessor works, and it is actually simple to understand. But we are going to call RAM — also a temporary storage system — think of it as a computer’s memory bank.
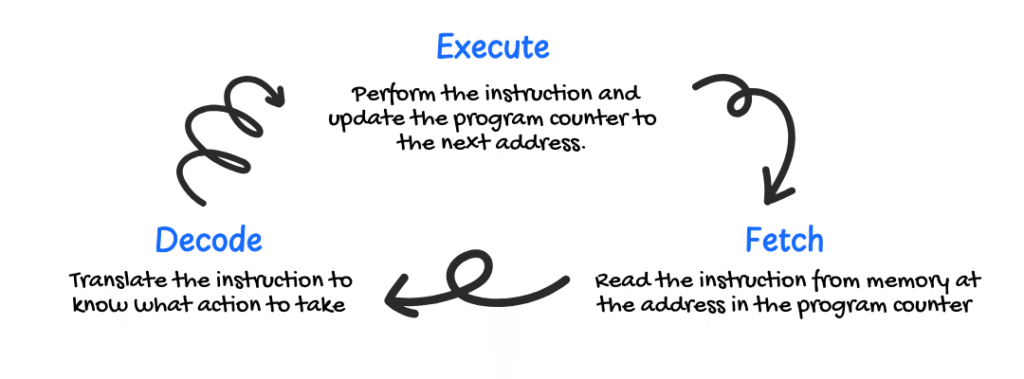
The process of the microprocessor executing tasks given by the user runs under a cycle called the instruction cycle, and it has 3 sub-processes:
1. Fetch:
The user, for example, opens a program. This act itself sends a sequence of instructions to the microprocessor by first putting the sequence in the RAM in the form of machine code (which we often represent in hexadecimal). Then, the microprocessor fetches each single element of the sequence.But it also needs to keep track of which index it is in, so it uses a program counter (or instruction pointer), which is a register that points to the next instruction — in other words, stores the memory address of the next instruction.
2. Decode:
After fetching the instruction from RAM, the Control Unit comes to decode it. This means it interprets the binary instruction to understand what needs to be done — for example, whether to add two numbers, move data between memory and a register, or compare two values. Based on this decoding, it sends the right control signals to other parts of the microprocessor, like the ALU and registers, to prepare for execution.
3. Execute:
In the execution part, the instruction activates specific components of the microprocessor to carry out the task. The ALU, as explained earlier, does the math and binary operations (+, −, ×, ÷), or comparing values (returning 1 as true or 0 as false). The registers store any temporary results, and the Control Unit may also move data to or from memory if needed.
Note: You may see fetch-execute instead of fetch-decode-execute, it’s the same, with the decoding step considered part of the execute process.
After the cycle is done, the microprocessor repeats the same cycle on the next instruction.
Here is an illustration simplifying this process.
In Robotics, When Might You Use a Microprocessor?
Technically speaking, you can use a microprocessor whenever you want. But as engineers, alongside performance, we also care about efficiency and cost. So, you may choose a microprocessor when:
- You need a Linux OS to do things that an RTOS on a microcontroller can’t handle, like file handling, multitasking, etc.
- You require heavy processing power (e.g., image processing, AI).
- Your project involves many connection types (Ethernet, Bluetooth, multiple USB devices).
- You want flexibility with software, such as running complex web applications or ROS (Robot Operating System).
On the other hand, you may want to avoid using a microprocessor if the tasks can be handled by a less power-hungry device like a microcontroller, which is also much cheaper.
Bonus: The today problem with classical microprocessors
Moore made a law that consists of the number of transistors in the chip area. He made a prediction that each year, there will be an exponential growth of transistors in the same chip area — which means smaller transistors → less atoms. As we reach a small amount of atoms per semiconductor, things start acting illogically.
In classical material physics, a doped semiconductor doesn’t let a particle pass through a potential barrier unless its energy is higher than the barrier itself. So when we have an insulating barrier, the particle should not pass.
The problem is: when we have a very small amount of silicon atoms, the particles (in this case, electrons) somehow pass through, in an arbitrary way, regardless of the potential barrier.
This phenomenon in quantum physics is called quantum tunneling.
This creates a problem with the microprocessor, as we can no longer fully control its state. And this is where other technologies may come in handy, such as quantum computing, to continue improving processing power beyond today’s limits.
I’m leaving a link to one of the best free resources that explains how a CPU works, created by Lexi Mattick & Hack Club — it’s clear, beginner-friendly, and definitely worth checking out. Big thanks to her.
In short, understanding microprocessors means understanding what really drives your robot — not just the code, but the brain behind it.
2 comments